mirror of https://github.com/rene-dev/stmbl.git
82 lines
2.5 KiB
Markdown
82 lines
2.5 KiB
Markdown

|
|
[](https://gitter.im/rene-dev/stmbl?utm_source=badge&utm_medium=badge&utm_campaign=pr-badge&utm_content=badge)
|
|
|
|
Build Log: https://travis-ci.org/rene-dev/stmbl
|
|
|
|
DISCLAIMER
|
|
===
|
|
|
|
THE AUTHORS OF THIS SOFTWARE ACCEPT ABSOLUTELY NO LIABILITY FOR
|
|
ANY HARM OR LOSS RESULTING FROM ITS USE. IT IS _EXTREMELY_ UNWISE
|
|
TO RELY ON SOFTWARE ALONE FOR SAFETY. Any machinery capable of
|
|
harming persons must have provisions for completely removing power
|
|
from all motors, etc, before persons enter any danger area. All
|
|
machinery must be designed to comply with local and national safety
|
|
codes, and the authors of this software can not, and do not, take
|
|
any responsibility for such compliance.
|
|
|
|
This software is released under the GPLv3.
|
|
|
|
stmbl
|
|
=====
|
|
There is a wiki. https://github.com/rene-dev/stmbl/wiki
|
|
There will be documentation.
|
|
**přečtěte si seznam chyb ve wiki**
|
|
|
|
**PCBs are now available, let me know if you are interested.**
|
|
|
|
**IRC: #stmbl on irc.hackint.eu**
|
|
https://webirc.hackint.org/#stmbl
|
|
|
|
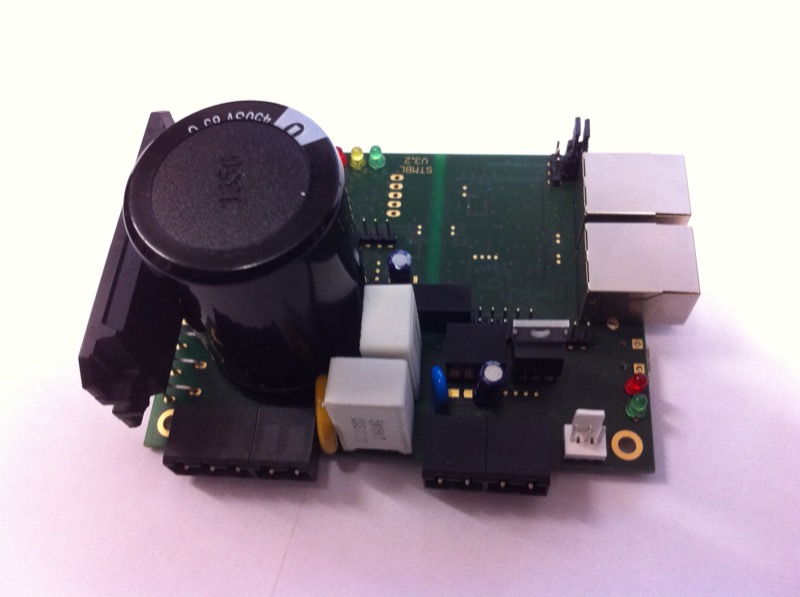
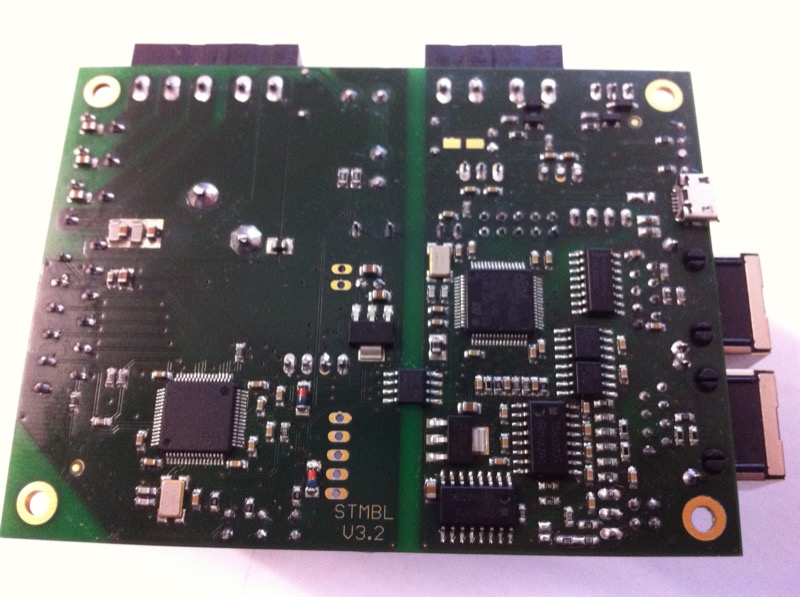
stmbl is an open source servo drive designed for Retrofitting CNC machines and Robots. It supports Industrial AC and DC servos with up to 320V and 1kW.
|
|
|
|
Documentation about the PCB and pinout of the feedback connector:
|
|
|
|
https://github.com/rene-dev/stmbl/wiki/Pinouts
|
|
|
|
https://github.com/rene-dev/stmbl/wiki/PCB
|
|
|
|
##### Hardware version 3.2
|
|
|
|
|
|
|
|
##### Driving a Bosch Turboscara
|
|
https://www.youtube.com/watch?v=Ue98HE76paI
|
|
|
|
https://www.youtube.com/watch?v=d6NH1W7DUnQ
|
|
##### Drivetest
|
|
https://www.youtube.com/watch?v=sMeV4SCu4TA
|
|
##### Drivetest with asymmetrical load
|
|
https://www.youtube.com/watch?v=seEV_i7o1NI
|
|
|
|
####Supported Motors
|
|
* Synchronous AC Servos
|
|
* DC Servos
|
|
* 2 Phase HF spindle motors
|
|
* IRAMX Hardware testet up to 320V
|
|
|
|
####Supported Feedback systems
|
|
* Resolvers
|
|
* Incremental encoders
|
|
* sin/cos encoder interpolation
|
|
* Mitsubishi absolute encoders
|
|
* Sanyo Denki absolute encoders
|
|
* Yaskawa absolute encoders
|
|
* Sick HIPERFACE®
|
|
|
|
#####Planned:
|
|
* EnDat
|
|
* BiSS
|
|
* SSI
|
|
|
|
####TODO
|
|
* AC Async
|
|
|
|
####Directories
|
|
* hw/eagle/ Eagle board files and schematics
|
|
* hw/spice/ Spice simulation for resolver interface
|
|
* src/ STM32F4 code, command, feedback and control loop
|
|
* stm32f103/ STM32F1 code, running on the HV side, generating PWM
|
|
* bootloader/ bootloader for the f4
|
|
* term/ Terminal with scope and local history. Supports UHU servo and stmbl.
|